Sensor Tuning Guide#
To create visually good images from the raw data provided by the camera sensor, a lot of image processing takes place. This is usually done inside an ISP (Image Signal Processor). To be able to do the necessary processing, the corresponding algorithms need to be parameterized according to the hardware in use (typically sensor, light and lens). Calculating these parameters is a process called tuning. The tuning process results in a tuning file which is then used by libcamera to provide calibrated parameters to the algorithms at runtime.
The processing blocks of an ISP vary from vendor to vendor and can be arbitrarily complex. Nevertheless a diagram of common blocks frequently found in an ISP design is shown below:
+--------+ | Light | +--------+ | v +--------+ +-----+ +-----+ +-----+ +-----+ +-------+ | Sensor | -> | BLC | -> | AWB | -> | LSC | -> | CCM | -> | Gamma | +--------+ +-----+ +-----+ +-----+ +-----+ +-------+
Light The light used to light the scene has a crucial influence on the resulting image. The human eye and brain are specialized in automatically adapting to different lights. In a camera this has to be done by an algorithm. Light is a complex topic and to correctly describe light sources you need to describe the spectrum of the light. To simplify things, lights are categorized according to their color temperature (K). This is important to keep in mind as it means that calibrations may differ between light sources even though they have the same nominal color temperature.
For best results the tuning images need to be taken for a complete range of light sources.
Sensor The sensor captures the incoming light and converts a measured analogue signal to a digital representation which conveys the raw images. The light is commonly filtered by a color filter array into red, green and blue channels. As these filters are not perfect some postprocessing needs to be done to recreate the correct color.
BLC Black level correction. Even without incoming light a sensor produces pixel values above zero. This is due to two system artifacts that impact the measured light levels on the sensor. Firstly, a deliberate and artificially added pedestal value is added to get an evenly distributed noise level around zero to avoid negative values and clipping the data.
Secondly, additional underlying electrical noise can be caused by various external factors including thermal noise and electrical interferences.
To get good images with real black, that black level needs to be subtracted. As that level is typically known for a sensor it is hardcoded in libcamera and does not need any calibration at the moment. If needed, that value can be manually overwritten in the tuning configuration.
AWB Auto white balance. For a proper image the color channels need to be adjusted, to get correct white balance. This means that monochrome objects in the scene appear monochrome in the output image (white is white and gray is gray). Presently in the libipa implementation of libcamera, this is managed by a grey world model. No tuning is necessary for this step.
LSC Lens shading correction. The lens in use has a big influence on the resulting image. The typical effects on the image are lens-shading (also called vignetting). This means that due to the physical properties of a lens the transmission of light falls of towards the corners of the lens. To make things even harder, this falloff can be different for different colors/wavelengths. LSC is therefore tuned for a set of light sources and for each color channel individually.
CCM Color correction matrix. After the previous processing blocks the grays are preserved, but colors are still not correct. This is mostly due to the color temperature of the light source and the imperfections in the color filter array of the sensor. To correct for this a ‘color correction matrix’ is calculated. This is a 3x3 matrix, that is used to optimize the captured colors regarding the perceived color error. To do this a chart of known and precisely measured colors commonly called a macbeth chart is captured. Then the matrix is calculated using linear optimization to best map each measured colour of the chart to it’s known value. The color error is measured in deltaE.
Gamma Gamma correction. Today’s display usually apply a gamma of 2.2 for display. For images to be perceived correctly by the human eye, they need to be encoded with the corresponding inverse gamma. See also <https://en.wikipedia.org/wiki/Gamma_correction>. This block doesn’t need tuning, but is crucial for correct visual display.
Materials needed for the tuning process#
Precisely calibrated optical equipment is very expensive and out of the scope of this document. Still it is possible to get reasonably good calibration results at little costs. The most important devices needed are:
A light box with the ability to produce defined light of different color temperatures. Typical temperatures used for calibration are 2400K (incandescent), 2700K (fluorescent), 5000K (daylight fluorescent), 6500K (daylight). As a first test, keylights for webcam streaming can be used. These are available with support for color temperatures ranging from 2500K to 9000K. For better results professional light boxes are needed.
A ColorChecker chart. These are sold from calibrite and it makes sense to get the original one.
A integration sphere. This is used to create completely homogenious light for the lens shading calibration. We had good results with the use of a large light panel with sufficient diffusion to get an even distribution of light (the above mentioned keylight).
An environment without external light sources. Ideally calibration is done without any external lights in a fully dark room. A black curtain is one solution, working by night is the cheap alternative.
Overview over the process#
The tuning process of libcamera consists of the following steps:
Take images for the tuning steps with different color temperatures
Configure the tuning process
Run the tuning script to create a corresponding tuning file
Taking raw images with defined exposure/gain#
For all the tuning files you need to capture a raw image with a defined exposure
time and gain. It is crucial that no pixels are saturated on any channel. At the
same time the images should not be too dark. Strive for a exposure time, so that
the brightest pixel is roughly 90% saturated. Finding the correct exposure time
is currently a manual process. We are working on solutions to aid in that
process. After finding the correct exposure time settings, the easiest way to
capture a raw image is with the cam application that gets installed with the
regular libcamera install.
Create a constant-exposure-<temperature>.yaml file with the following content:
frames:
- 0:
AeEnable: false
AnalogueGain: 1.0
ExposureTime: 1000
- Then capture one or more images using the following command:
cam -c 1 --script constant-exposure-<temperature>.yaml -C -s role=raw --file=image_#.dng
Note
Typically the brightness changes for different colour temperatures. So this has to be readjusted for every colour temperature.
Capture images for lens shading correction#
To be able to correct lens shading artifacts, images of a homogeneously lit neutral gray background are needed. Ideally a integration sphere is used for that task.
As a fallback images of a flat panel light can be used. If there are multiple images for the same color temperature, the tuning scripts will average the tuning results which can further improve the tuning quality.
Note
Currently lsc is ignored in the ccm calculation. This can lead to slight color deviations and will be improved in the future.
Images shall be taken for multiple color temperatures and named
alsc_<temperature>k_#.dng. # can be any number, if multiple images are
taken for the same color temperature.

Sample setup using a flat panel light. In this specific setup, the camera has to be moved close to the light due to the wide angle lens. This has the downside that the angle to the light might get way too steep.#
A calibration image for lens shading correction.#
Ensure the full sensor is lit. Especially with wide angle lenses it may be difficult to get the full field of view lit homogeneously.
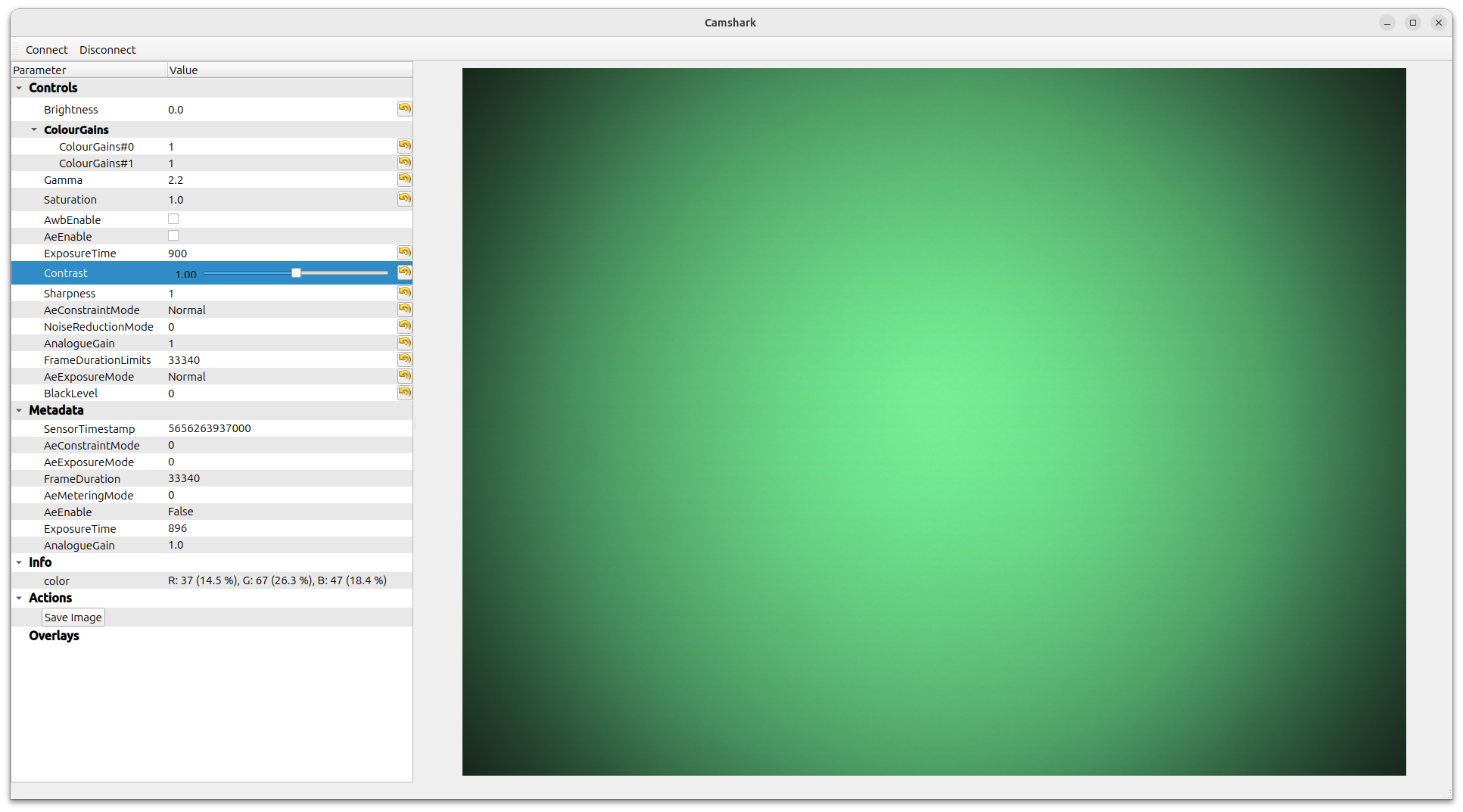
Ensure that the brightest area of the image does not contain any pixels that reach more than 95% on any of the colors (can be checked with camshark).
- Take a raw dng image for multiple color temperatures:
cam -c 1 --script constant-exposure-<temperature>.yaml -C -s role=raw --file=alsc_3200k_#.dng
Capture images for color calibration#
To do the color calibration, raw images of the color checker need to be taken
for different light sources. These need to be named
<sensor_name>_<lux-level>l_<temperature>k_0.dng.
- For best results the following hints should be taken into account:
Ensure that the 18% gray patch (third from the right in bottom line) is roughly at 18% saturation for all channels (a mean of 16-20% should be fine)
Ensure the color checker is homogeneously lit (ideally from 45 degree above)
No straylight from other light sources is present
The color checker is not too small and not too big (so that neither lens shading artifacts nor lens distortions are prevailing in the area of the color chart)
If no lux meter is at hand to precisely measure the lux level, a lux meter app on a mobile phone can provide a sufficient estimation.

Run the tuning scripts#
After taking the calibration images, you should have a directory with all the tuning files. It should look something like this:
../tuning-data/ ├── alsc_2500k_0.dng ├── alsc_2500k_1.dng ├── alsc_2500k_2.dng ├── alsc_6500k_0.dng ├── imx335_1000l_2500k_0.dng ├── imx335_1200l_4000k_0.dng ├── imx335_1600l_6000k_0.dng
The tuning scripts are part of the libcamera source tree. After cloning the libcamera sources the necessary steps to create a tuning file are:
# install the necessary python packages cd libcamera python -m venv venv source ./venv/bin/activate pip install -r utils/tuning/requirements.txt # run the tuning script utils/tuning/rkisp1.py -c config.yaml -i ../tuning-data/ -o tuning-file.yaml
After the tuning script has run, the tuning file can be tested with any
libcamera based application like qcam. To quickly switch to a specific tuning
file, the environment variable LIBCAMERA_<pipeline>_TUNING_FILE is helpful.
E.g.:
LIBCAMERA_RKISP1_TUNING_FILE=/path/to/tuning-file.yaml qcam -c1
Sample images#
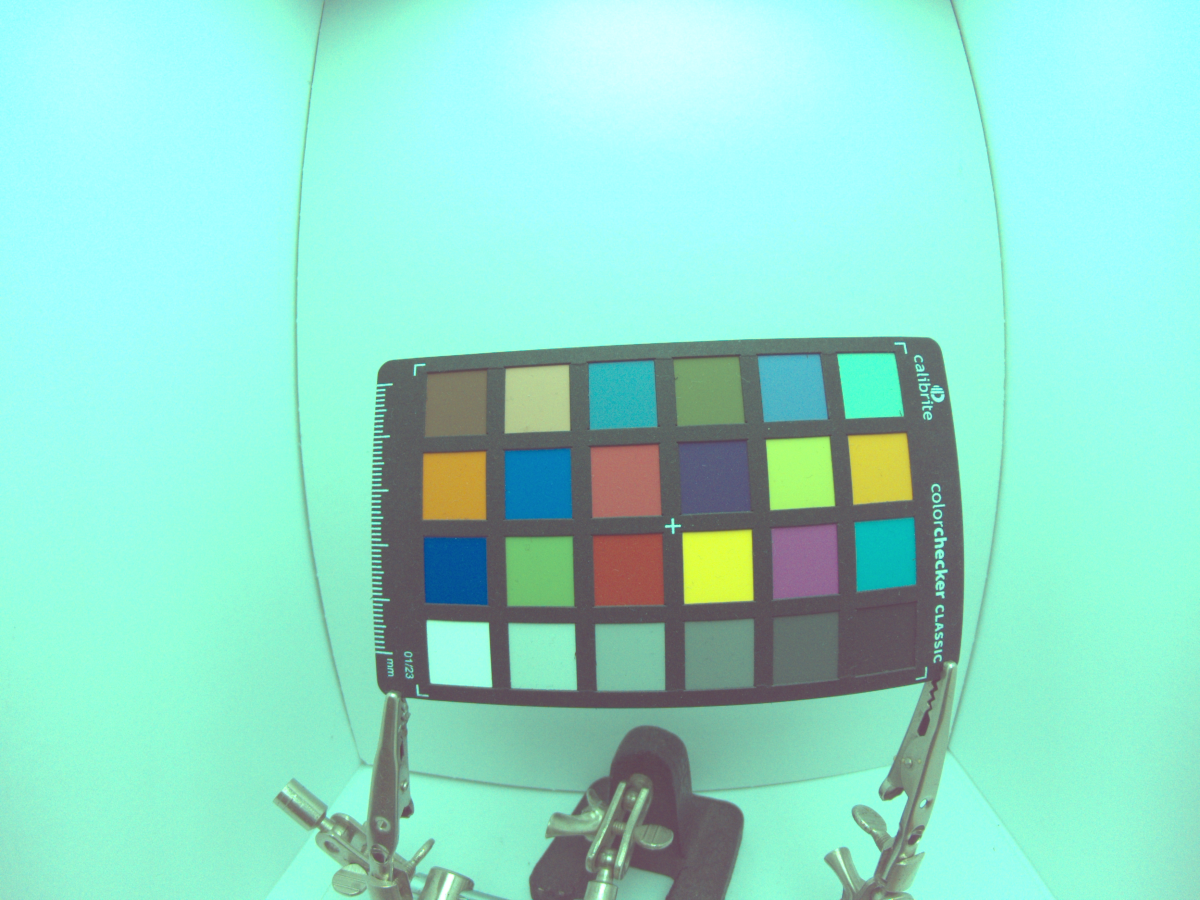
Image without black level correction (and completely invalid color estimation).#

Image without lens shading correction @ 3000k. The vignetting artifacts can be clearly seen#

Image without lens shading correction @ 6000k. The vignetting artifacts can be clearly seen#

Fully tuned image @ 3000k#

Fully tuned image @ 6000k#